گزارش پيشرو سعي دارد تا در گام اول به بررسي ويژگيهاي کلي يک الکتروموتور بپردازد. به طور کلي الکتروموتور را ميتوان جرء اصلي براي تمام صنايع دانست. هر کجا که چرخش مد نظر باشد، الکتروموتور با به طور کلي يک موتور دخيل است. در اين مقاله مشخصات الکتروموتور ، انواع الکتروموتور ، پارامترهاي مهم در انتخاب الکتروموتور، درجه حفاظت و بسياري مفاهيم کاربردي در مورد الکتروموتور بيان شده است. الکتروموتور نوعي ماشين است که انرژي الکتريکي را به حرکتي تبديل ميکند. نحوه کار الکتروموتورها به اين صورت است که از طريق القاي الکترومغناطيسي، ميدان مغناطيسي چرخشي، جريان را در هاديهاي روتور ايجاد مينمايد و سبب چرخاندن روتور در جهت چرخش ميدان ميشود. الکتروموتور سه فاز به موتورهاي الکتريکي گفته ميشود که برخلاف الکتروموتور تکفاز که تنها از فاز و نول براي کارکرد بهره ميگيرد، بايد براي ايجاد نيروي مکانيکي به برق سه فاز متصل شود. اين نوع الکتروموتور، براي ايجاد نيروي مغناطيسي چرخان موردنياز، از اختلاففاز موجود بين سه فاز تغذيه مجزا کمک ميگيرد.
• ولتاژ ورودي
• جريان ورودي
• گشتاور خروجي و سرعت
• درجه حفاظت که با علامت IP نمايش داده ميشود
• ضريب قدرت
• اندازه فريم
• شرايط محيطي نصب
• کلاس عايقي
• راندمان
معمولاً درباره محيط نصب الکتروموتور بايستي يک سري شرايط در نظر گرفته بشود تا عمر قسمتهاي مختلف موتور 3 فاز مانند عايق بين سيمپيچها، بلبرينگها، گريس استفادهشده در بلبرينگ و … به حداکثر برسد. مهمترين اين شرايط مربوط است به دما، رطوبت، لرزش و ارتفاع و . . . در محل نصب.
معمولاً قدرت و جريان نامي موتورهاي الکتريکي براي حداکثر دماي 40 ° C و ارتفاع (از سطح دريا) 1000 متر طراحيشده است. اگر شرايط دما و ارتفاع محيط از اين مقادير کند، حتماً بايد الکتروموتور کمتر از مقدار نامي زير بار برود. مقادير و ضرايب طبق دستورالعمل سازنده بايستي اعمال بشود. مثلاً براي يک سازنده خاص در کاتالوگ جدولي شبيه زير دادهشده است.
پس از اختراع برق، بي شک موتور و به طور خاص الکتروموتور يکي از مهمترين اختراعات مهندسي و تکنولوژي بوده است. به عنوان يک پاسخ ساده به اينکه الکتروموتور چگونه کار مي کند بايد گفت، الکتروموتور انرژي الکتريکي را به انرژي مغناطيسي و پس از آن به انرژي مکانيکي تبديل مي کنند. اما اين کار به سادگي صورت نمي پذيرد. اغلب موتور هاي الکتريکي دوار هستند ولي موتور هاي الکتريکي هم وجود دارند که دوار نيستند. برعکس ژنراتورها که نيروي مکانيکي را به الکتريکي تبديل مي کنند، در الکتروموتور نيروي الکتريکي به مکانيکي تبديل مي شود. از زمان اختراع موتور تا به الان پيشرفتهاي وسيعي در اين زمينه گسترش يافته است.
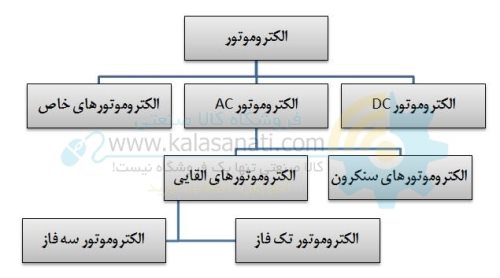
به طور کلي وقتي جسمي که حامل جريان الکتريکي است تحت ميدان مغناطيسي قرار ميگيرد، بر روي آن جسم نيرو اعمال ميشود. به عنوان يک مثال ساده ميتوان دو آهنربا را در نظر گرفت. در آهنربا قطبهاي همنام هم ديگر را دفع و قطبهاي نا همنام يکديگر را جذب مي کنند. در الکتروموتور يک بخش ثابت قرار دارد که استاتور ناميده مي شود و يک بخش دوار که روتور است. تصوير زير دسته بندي انواع الکتروموتور را نمايش مي دهد:

درباره این سایت